Introduction
In this tutorial we’ll be taking a closer look at the Zephyr real-time operating system (RTOS). Before we dive in, it might be useful to understand why RTOS has become a foundational building block for modern embedded systems.
As embedded systems have become increasingly complex with more devices becoming connected to the Internet, the difficulty of writing software for such systems has increased as well. Modern applications often require a delicate balance: between executing multiple tasks simultaneously (with tight timing constraints), as well as managing complex protocols such as WiFi, Bluetooth, USB, encryption,… To deal with this increased complexity, programming purely on the bare metal is no longer a feasible proposition. An RTOS provides an abstraction layer for certain commonly used functionality allowing the developer to focus on the actual application itself, without having to re-implement everything from scratch.
In this tutorial we won’t necessarily be digging ‘under the hood’ of the workings of a modern RTOS, there have already been written many books that cover this topic quite extensively. Instead we’ll be mainly focusing on learning how to use the functionality provided by Zephyr.
Why Zephyr?
Zephyr RTOS is a relatively new real-time operating system that offers support for a wide variety of MCU architectures. You get all the common kernel features such as threads, semaphores, mutexes, etc. that other RTOSes provide (with FreeRTOS being another popular option). A complete in-depth technical comparison between the different RTOSes is beyond the scope this tutorial, but suffice it to say I think Zephyr does a good job in making it easy to work with these “kernel objects”.
Open source
Another major benefit of Zephyr RTOS is that it is completely open source and backed by the Linux Foundation. Other RTOSes are often backed by industry giants such as Amazon (FreeRTOS), Azure RTOS (Microsoft) and MbedOS (ARM); resulting in possible vendor lock-in down the line.
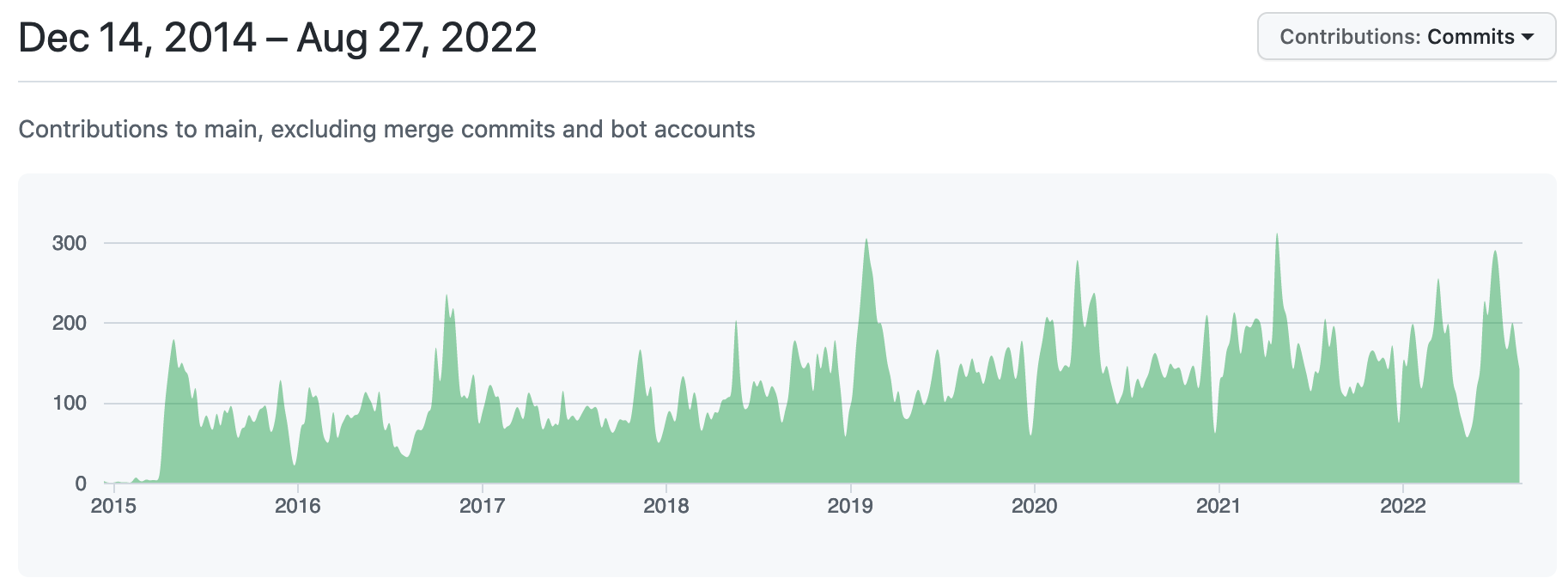
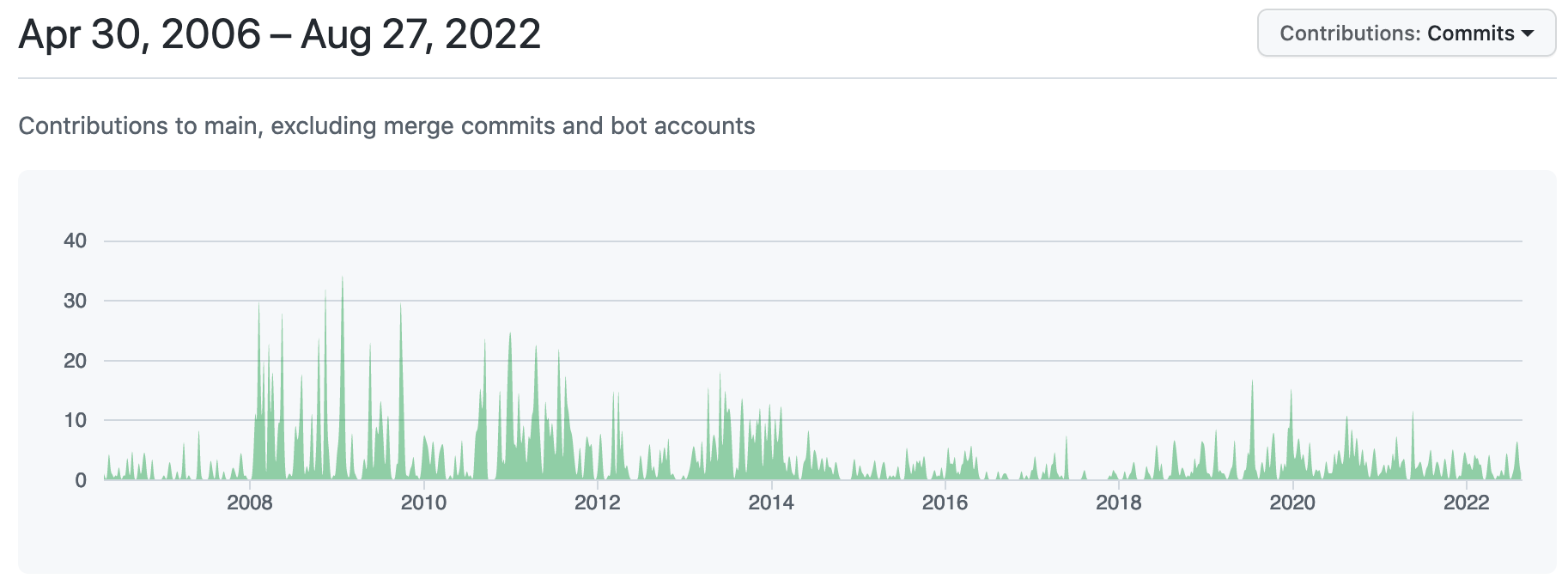
Perhaps unsurprisingly this open nature has heavily accelereated Zephyr’s adoption, this can be seen when comparing the number of contributions between the different RTOS projects:
Contributions to the Zephyr RTOS GitHub repository
Contributions to the FreeRTOS GitHub repository
Contributions to the Azure RTOS GitHub repository

Kconfig
Another distinctive feature of Zephyr is its unique build and configuration system. For those coming from the embedded Linux world, Kconfig is a familiar feature that allows developers to adjust the build process of the kernel, and include only those features that are used (hereby reducing the memory footprint).
There’s many more features that can be discussed, if you’re interested this article covers some additional benefits of using Zephyr.
Examples
And last but not least here are some companies that are already using Zephyr in their products: